RViz
Overview
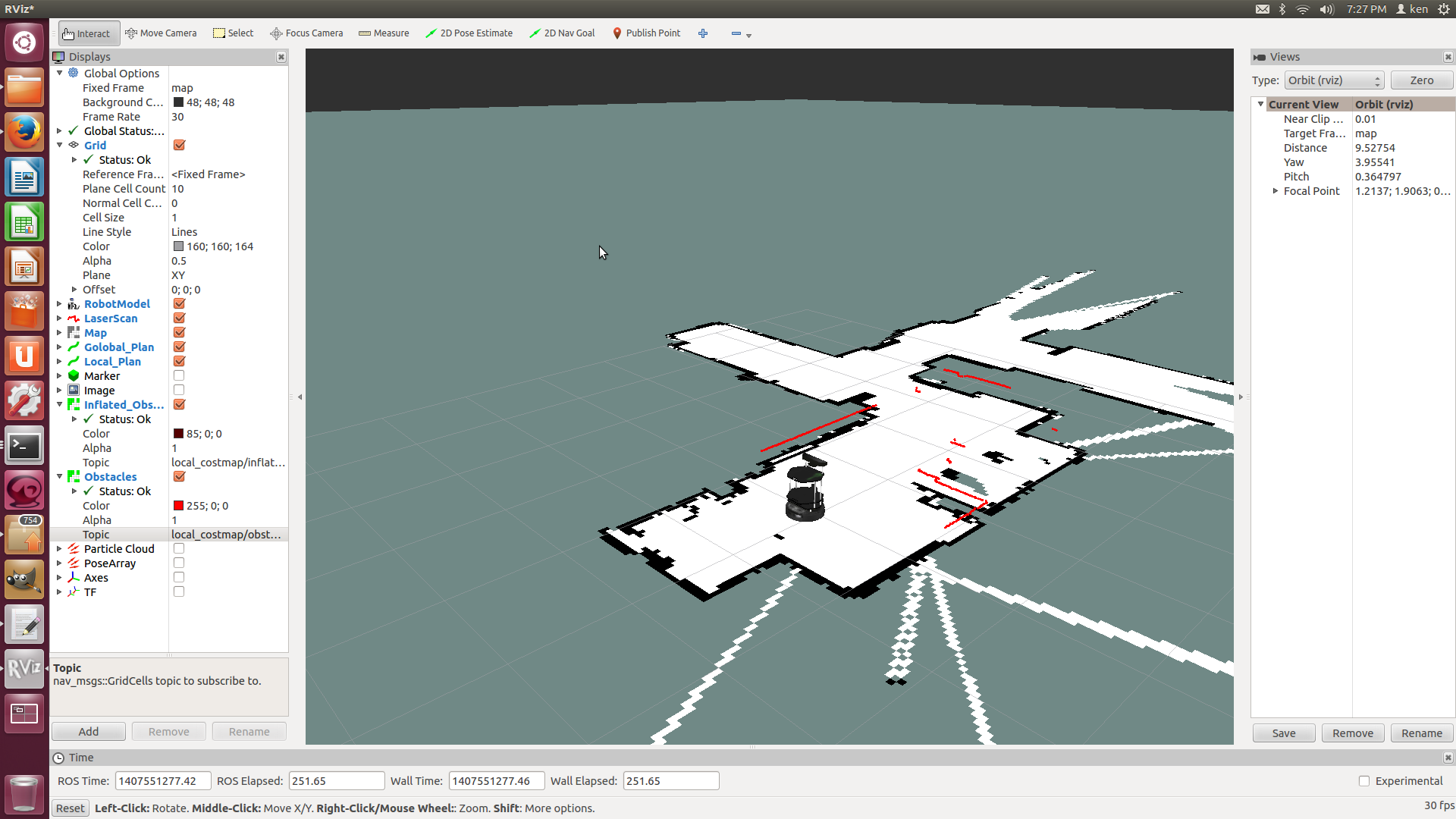
- 3D visualization tool for ROS
- Subscribes to topics and visualizes the message contents
- Different camera views (orthographic, top-down, etc.)
- Interactive tools to publish user information
- Save and load setup as RViz configuration
- Extensible with plugins
Run
rosrun rviz rviz
Save configuration with ctrl+s
Built-In Display Types
| Name | Description | Messages Used |
|---|---|---|
| Axes | Displays a set of Axes | |
| Effort | Shows the effort being put into each revolute joint of a robot. | sensor_msgs/JointStates |
| Camera | Creates a new rendering window from the perspective of a camera, and overlays the image on top of it. | sensor_msgs/Image, sensor_msgs/CameraInfo |
| Grid | Displays a 2D or 3D grid along a plane | |
| Grid Cells | Draws cells from a grid, usually obstacles from a costmap from the navigation stack. | nav_msgs/GridCells |
| Image | Creates a new rendering window with an Image. Unlike the Camera display, this display does not use a CameraInfo. Version: Diamondback+ | sensor_msgs/Image |
| InteractiveMarker | Displays 3D objects from one or multiple Interactive Marker servers and allows mouse interaction with them. Version: Electric+ | visualization_msgs/InteractiveMarker |
| Laser Scan | Shows data from a laser scan, with different options for rendering modes, accumulation, etc. | sensor_msgs/LaserScan |
| Map | Displays a map on the ground plane. | nav_msgs/OccupancyGrid |
| Markers | Allows programmers to display arbitrary primitive shapes through a topic | visualization_msgs/Marker, visualization_msgs/MarkerArray |
| Path | Shows a path from the navigation stack. | nav_msgs/Path |
| Point | Draws a point as a small sphere. | geometry_msgs/PointStamped |
| Pose | Draws a pose as either an arrow or axes. | geometry_msgs/PoseStamped |
| Pose Array | Draws a "cloud" of arrows, one for each pose in a pose array | geometry_msgs/PoseArray |
| Point Cloud(2) | Shows data from a point cloud, with different options for rendering modes, accumulation, etc. | sensor_msgs/PointCloud, sensor_msgs/PointCloud2 |
| Polygon | Draws the outline of a polygon as lines. | geometry_msgs/Polygon |
| Odometry | Accumulates odometry poses from over time. | nav_msgs/Odometry |
| Range | Displays cones representing range measurements from sonar or IR range sensors. Version: Electric+ | sensor_msgs/Range |
| RobotModel | Shows a visual representation of a robot in the correct pose (as defined by the current TF transforms). | |
| TF | Displays the ros wiki tf transform hierarchy. | |
| Wrench | Draws a wrench as arrow (force) and arrow + circle (torque) | |
| Oculus | Renders the RViz scene to an Oculus headset |